DJI L3 vs. L2 (vs. L1): Vergleich der LiDAR-Scanner für die Forstwirtschaft
02. Dezember 2025
Technische Evolution: Mit den Generationen L1, L2 und L3 hat DJI die LiDAR-Leistung deutlich gesteigert – mehr Rücksignale, höhere Pulsraten und eine wesentlich größere Reichweite.
Flächenleistung & Effizienz: Der L3 reduziert die benötigte Flugzeit gegenüber dem L2 um etwa ein Drittel – ideal für Inventuren und großflächige Bestandsaufnahmen.
Mehr als nur Kronendach: Durch mehrfache Rücksignale und ein optimiertes Laser-Design erfassen L2 und L3 auch Unterkronenbereiche und den Boden selbst in dichter Vegetation zuverlässig.
Empfohlene Anwendung: Für Routine-Inventuren und mittelgroße Waldflächen bietet der L2 ein hervorragendes Preis-Leistungs-Verhältnis; für sehr große oder besonders anspruchsvolle Projekte ist der L3 die beste Wahl.
Einleitung und Zielsetzung
Seit Mitte 2022 setzen wir bei der OGF GmbH LiDAR-Technologie ein, um hochwertige Datengrundlagen für unsere waldbezogenen Projekte zu schaffen – insbesondere für Forsteinrichtungen und Stichprobeninventuren, aber auch für zahlreiche weitere Anwendungsfelder. Angefangen haben wir mit dem DJI Zenmuse L1, später folgte der deutlich leistungsstärkere L2. Nun steht mit dem Anfang November 2025 vorgestellten Zenmuse L3 bereits die neueste Scanner-Generation zur Verfügung.
Der Zenmuse L1 wurde bereits Ende 2020 auf den Markt gebracht, der L2 folgte rund drei Jahre später im Oktober 2023, und nun – nur zwei weitere Jahre danach – wurde im November 2025 der DJI Zenmuse L3 präsentiert. Die Entwicklungsgeschwindigkeit ist also sehr hoch. Doch wirft sie eine zentrale Frage auf: Wie groß sind die praktischen Fortschritte im Wald wirklich? Lohnt sich der Umstieg – oder ist ein älteres Modell möglicherweise vollkommen ausreichend?
Um dieser Frage auf den Grund zu gehen, haben wir einen direkten Vergleichstest durchgeführt: Noch vor der offiziellen Ankündigung erhielten wir zusammen mit unserem Partner Airclip die Möglichkeit, den Zenmuse L3 einen Tag lang exklusiv in der Praxis zu erproben. Für diesen Test nahmen wir alle drei Scanner – L1, L2 und L3 – mit in ein Waldgebiet nahe Dresden, das sowohl einfach strukturierte als auch komplexe Bestandesformen aufweist. Ideale Voraussetzungen also für einen belastbaren Vergleich.
Warum LiDAR für die Forstwirtschaft – und worauf kommt es an?
In der forstlichen Praxis steht meist nicht maximal mögliche Genauigkeiten im Vordergrund – es geht nicht darum, ob ein Baum exakt 28,65 m oder 28,71 m hoch ist. Entscheidend ist vielmehr, dass große Flächen, also mehrere Hundert bis Tausend Hektar, effizient, kostengünstig und flächendeckend erfasst werden können. Die technische Lösung muss also skalierbar sein – nicht nur präzise, sondern auch schnell, robust und wirtschaftlich.
Für unsere Arbeit ist zudem ein weiterer Punkt entscheidend: Die eingesetzte Technik muss es ermöglichen, in einem einzigen Überflug sowohl LiDAR-Daten als auch RGB-Bildmaterial zu erfassen. Nur so lassen sich sowohl 3D-Geländemodelle als auch aktuelle Orthofotos effizient erzeugen – eine doppelte Befliegung wäre für unsere Kunden meist wirtschaftlich nicht tragbar.
Dieser Artikel beleuchtet deshalb aus forstpraktischer Sicht, wie sich die drei DJI-Scanner im direkten Einsatz schlagen – in Bezug auf Flächenleistung, Datenqualität, Bodenpunktdichte und Praxis-Handling. Welche Stärken bringt der neue L3 tatsächlich – und wo reichen L1 oder L2 möglicherweise völlig aus?

Die drei getesteten Systeme im Vergleich: DJI Zenmuse L1 (links), DJI Zenmuse L2 (Mitte), DJI Zenmuse L3 (rechts).
Drei LiDAR-Scanner im direkten Vergleich
Die drei LiDAR-Scanner von DJI – L1, L2 und L3 – unterscheiden sich deutlich in ihrer Leistungsfähigkeit. Beim ersten Modell, dem L1, zeigten sich klare Einschränkungen: Die integrierte RGB-Kamera liefert nur eingeschränkt brauchbare Bilder und erfüllt unsere Anforderungen an Orthofotos kaum. Daher haben wir Flächen damals noch doppelt beflogen: L1 für die LiDAR-Daten und P1 für die Photogrammetrie. Doch das war nicht er einzige Nachteil des L1: vor jedem Einsatz benötigte die IMU eine Aufwärmphase von etwa 5–10 Minuten, was den stark Workflow verlangsamt.
Mit dem L2 wurde vieles besser: Die RGB-Bildqualität ist deutlich gesteigert, die Punktwolken sind präziser, und die Durchdringung von Vegetation gelingt wesentlich zuverlässiger – das war für uns ein wirklich messbarer Fortschritt. Der L1 fristet dem Erscheinen des L2 daher sein Dasein im OGF Museum. Der neue L3 wiederum setzt, zumindest auf dem Papier, in allen Punkten nochmals spürbar einen drauf: höhere Punktdichte, größere Reichweite, bessere Farbdaten.
Doch bevor wir zu viele Ergebnisse vorwegnehmen, folgt hier zunächst ein technischer Überblick über die drei Systeme.
| Merkmal | DJI Zenmuse L1 | DJI Zenmuse L2 | DJI Zenmuse L3 |
|---|---|---|---|
| Vorstellung | Okt. 2020 | Okt. 2023 | Nov. 2025 |
| Laserklasse | Livox (905 nm) | DJI Frame LiDAR (905 nm) | 1535 nm Pulsed Laser |
| Max. Reichweite | ~450 m (80 % Reflektivität) | ~450 m (50 %) / 250 m (10 %) | ~950 m (10 %) |
| Pulsrate | 240 kHz | 240 kHz | bis 2.000 kHz (2 MHz) |
| Rückgaben (Returns) | bis zu 3 | bis zu 5 | bis zu 16 |
| Genauigkeit (vertikal) | ~5 cm @ 50 m | ~4 cm @ 150 m | ~3 cm @ 120 m |
| Laser-Spotgröße @ 100 m | ca. 50 × 5 cm | ca. 12 × 4 cm | < 5 cm Durchmesser |
| Kamera | 20 MP / 1″ CMOS | 20 MP / 4/3″ CMOS | 2 × 100 MP / 4/3″ CMOS |
| Foto-Intervall | ~2 s | ~0,7 s | ~0,5 s |
| IMU-Warmup erforderlich | Ja (~5–10 Min) | Nein | Nein |
| Kompatible Drohnen | Matrice 300/350 RTK | Matrice 300/350/400 RTK | Matrice 400 RTK |
| IP-Schutzklasse | IP54 | IP54 | IP54 |
| Typische Flächenleistung | ~2 km²/Flug | ~2,5 km²/Flug | bis zu 10 km²/Flug |
| Empfohlene Flughöhe | 50–100 m | 80–150 m | 120–300 m (bis 500 m möglich) |
Methodik & Untersuchungsfläche
Untersuchungsgebiet
Für den direkten Vergleich der DJI Zenmuse LiDAR-Scanner L1, L2 und L3 wurde ein Testfeld in einem Waldgebiet nahe Dresden (Sachsen) ausgewählt. Die Fläche bietet abwechslungsreiche Bedingungen mit einfachen bis mehrschichtigen Bestandesstrukturen bestehend aus vorwiegend Kiefer, Fichte und Birke und ist damit ideal geeignet, um die Leistungsfähigkeit der Systeme unter realistischen forstlichen Bedingungen zu beurteilen. Ziel war es, die Leistungsfähigkeit der Scanner bei unterschiedlich dichter Vegetation, ihre Bodenpunkt-Erfassungsfähigkeit sowie ihre Effizienz bei Flächenabdeckung und Bildintegration zu testen.
Befliegungsparameter
Die Flugplanung erfolgte direkt in DJI Pilot 2. Die seitliche Überlappung der Flugbahnen wurde dabei anhand der Überlappung der Realbilder festgelegt und betrug bei allen Flügen 75 %. Die Frontüberlappung wurde auf 80 % gesetzt – aus unserer Erfahrung die geringstmögliche Überlappung, um noch verwertbare Orthofotos im Wald erzeugen zu können. Höhere Überlappungen liefern zwar bessere Ergebnisse, erhöhen jedoch auch den Zeit- und Datenaufwand erheblich. Alle weiteren Flugparameter sind in der folgenden Tabelle aufgeführt.
Was bei Betrachtung der Tabelle sicherlich auffällt sind die Einstellungen des L3. Die Settings bleiben hinter den maximal möglichen Einstellungen zurück. Wir haben uns hier jedoch an die von DJI empfohlenen Einstellungen für eine Flughöhe von 120 m über Grund gehalten.
| Eigenschaft | L1 | L2 | L3 |
|---|---|---|---|
| Drohne | DJI M350 RTK | DJI M400 RTK | DJI M400 RTK |
| Untersuchte Fläche | 52 ha | 78 ha | 78 ha |
| Flughöhe | 120 m AGL | 120 m AGL | 120 m AGL |
| Fluggeschwindigkeit | 9,8 m/s | 9,8 m/s | 9,8 m/s |
| LiDAR-Überlappung | 68 % | 68 % | 60 % |
| RGB-Seitenüberlappung | 75 % | 75 % | 75 % |
| RGB-Vorwärtsüberlappung | 80 % | 80 % | 80 % |
| Anzahl Rückgaben | 3 | 5 | 8 |
| LiDAR-Modus | linear | linear | linear |
| Sampling-Rate | 160 kHz | 240 kHz | 350 kHz |
Auswertung
Die Auswertung aller Datensätze erfolgte vollständig in DJI Terra (Version 5.1.0). Für sämtliche Punktwolken wurden identische Verarbeitungseinstellungen genutzt. Die Rekonstruktion erfolgte jeweils mit voller Punktdichte (High), um eine maximale Vergleichbarkeit sicherzustellen.
Die daraus abgeleiteten Produkte – etwa Digitales Geländemodell (DGM), Baumkronenhöhenmodell (CHM) und weitere Analysen – wurden anschließend über unsere interne Verarbeitungspipeline (basierend auf GNU R und Python) erzeugt.
Ergebnisse im Überblick
Effizienz: Der L3 erfasst dieselbe Fläche in einem einzigen Flug rund 35–40 % schneller als der L2 und bietet damit eine deutlich höhere Effizienz bei großflächigen Befliegungen.
Genauigkeit: Der Vergleich der Rücksignale zeigt, dass der L3 trotz deutlich breiterer Flugstreifen nahezu ebenso viele Bodenpunkte wie der L2 erfasst – ein Ergebnis, das seine hohe Sensoreffizienz und die starke Vegetationsdurchdringung unterstreicht, während der L1 erwartungsgemäß klar zurückfällt.
Abbildungsqualität: Der L3 liefert die mit Abstand vollständigsten und detailreichsten Punktwolken – insbesondere im Stamm- und Unterkronenbereich – während der L1 deutlich zurückfällt und der L2 solide, aber sichtbar weniger tief greifende Ergebnisse erzielt.
Durchdringungstiefe: Die Querschnitte zeigen klar: Der L3 durchdringt den Bestand am tiefsten und liefert selbst im Unterkronen- und Stammbereich eine besonders dichte Punktwolke, während der L2 bereits stark verbessert ist und der L1 deutlich zurückbleibt.
Ergebnisse im Detail
Fluganzahl und Flugzeit
Leider konnten wir aus zeitlich Gründen nicht die kompletten 78 ha mit allen Systemen beflogen. Beim L1 Scanner haben wir lediglich eine Fläche von 52 ha beflogen. Auch haben wir beim L1 eine DJI Matrice 350 RTK genutzt. Bei der Betrachtung von Fluganzahl und -dauer lassen wir wir das L1 daher außen vor. Zumal die Auswärmzeit die Effektivität ohnehin sehr stark beeinträchtigt.
Die Unterschiede der Befliegungszeit zwischen dem L2 und L3 sind sehr groß. Nach unseren ersten Erfahrungen gehen wir davon aus, dass eine zeitliche Einsparung von rund 35 – 40 % realistisch ist.
Mit dem Zenmuse L2 benötigte für die Erfassung von 78 ha zwei Flüge mit einer Gesamtflugzeit von 52 Minuten.
Mit dem Zenmuse L3 konnte dieselbe Fläche von 78 ha in nur einem einzigen Flug und 33 Minuten vollständig erfasst werden.
Rücksignale und Bodenpunkte
Mit jeder neuen Generation der DJI-LiDAR-Scanner stieg die Anzahl der möglichen Rücksignale (Returns) pro Laserpuls. Theoretisch sollte dies dazu führen, dass auch mehr Bodenpunkte und Punkte in tieferen Schichten erfasst werden, da zusätzliche Rückgaben eine tiefere Durchdringung der Vegetationsschichten ermöglichen. Doch wie wirkt sich das in der Praxis wirklich aus?
Um diese Frage zu beantworten, haben wir analysiert, wie viele Punkte pro Return-Klasse in den jeweiligen Datensätzen enthalten sind und wie viele davon letztlich als Bodenpunkte klassifiziert werden konnten. Die Anzahl der Bodenpunkte hängt natürlich stark vom verwendeten Klassifikationsalgorithmus ab. Für einen fairen Vergleich haben wir deshalb in allen Fällen die integrierte Bodenpunktklassifikation von DJI Terra verwendet – mit identischen Einstellungen für alle drei Datensätze. Dadurch bleiben die Ergebnisse direkt vergleichbar.
Die Analyse der Rücksignale zeigt deutlich, wie sich die technischen Unterschiede der drei Scanner-Generationen in der Punktwolke widerspiegeln. Während die Zenmuse L1 mit maximal drei Rückgaben nur begrenzte Informationen aus tieferen Vegetationsschichten liefert, ermöglichen die fünf Returns der L2 und die acht bzw. bis zu sechzehn Returns der L3 eine wesentlich vollständigere Abbildung der Baumkronen und des Unterwuchses.
Auffällig ist dabei, dass die Gesamtpunktzahl der L2 am höchsten ausfällt. Das liegt jedoch weniger an der Sensorleistung als an der Fluggeometrie: Da die Flugplanung aufgrund der Photogrammetrie erfolgte, wurde bei der L2 mit deutlich engeren Fluglinien gearbeitet als bei der L3. Dadurch beobachtet der Sensor den Bestand häufiger aus nahezu senkrechten Winkeln, was die Chancen erhöht, durch Kronenlücken hindurch den Boden zu treffen. Die hohe Punktzahl ist somit primär ein Effekt der dichteren Streifenabdeckung.
Umso bemerkenswerter ist, dass die L3 trotz wesentlich breiterer Flugstreifen nahezu den gleichen Anteil an Bodenpunkten erreicht wie die L2. Dieser Befund unterstreicht die hohe Leistungsfähigkeit des neuen Systems: Der kleinere Laser-Spot, die höhere Pulsenergie des 1535-nm-Lasers und die große Zahl möglicher Rücksignale ermöglichen dem L3 eine sehr effiziente Vegetationsdurchdringung, selbst unter geometrisch ungünstigeren Bedingungen.
Interessant ist außerdem, dass der relative Bodenpunkte-Anteil über alle drei Systeme hinweg bei etwa 19–20 % liegt. Das zeigt, dass die maximale Bodenpunktquote weniger vom Sensor abhängt, sondern vor allem durch die Transparenz der Vegetationsstruktur begrenzt wird. Selbst ein High-End-System wie der L3 kann nur dort den Boden erfassen, wo der Bestand tatsächlich Lücken zulässt.
Diese Ergebnisse verdeutlichen:
Der L2 profitiert stark von der engen Flugplanung.
Der L3 kompensiert breitere Flugstreifen durch deutlich höhere Sensoreffizienz.
Der L1 bleibt erwartungsgemäß weit zurück.
Damit liefern die Rücksignale und Bodenpunkte ein klares Bild der Fortschritte der drei LiDAR-Generationen – sowohl technisch als auch in der praktischen Waldanwendung.
| Zenmuse L1 | Zenmuse L2 | Zenmuse L3 | |
|---|---|---|---|
| Gesamtpunktzahl | 334.042.440 (100 %) | 941.582.477 (100 %) | 573.864.609 (100 %) |
| 1. Rücksignal | 266.158.309 (79,7 %) | 673.646.752 (71,5 %) | 340.720.010 (59,4 %) |
| 2. Rücksignal | 62.952.958 (18,8 %) | 233.613.294 (24,8 %) | 163.077.942 (28,4 %) |
| 3. Rücksignal | 4.931.173 (1,5 %) | 32.573.653 (3,5 %) | 54.295.971 (9,5 %) |
| .4. Rücksignal | – | 1.710.583 (0,2 %) | 13.088.349 (2,3 %) |
| 5. Rücksignal | – | 38.195 (0,0 %) | 2.324.810 (0,4 %) |
| 6. Rücksignal | – | – | 318.028 (0,1 %) |
| 7. Rücksignal | – | – | 35.852 (0,0 %) |
| 8. Rücksignal | – | – | 3.647 (0,0 %) |
| Bodenpunkte | 50.169.985 (19,2 %) | 138.936.350 (19,1 %) | 115.373.379 (20,1 %) |
LiDAR-Punktqualität
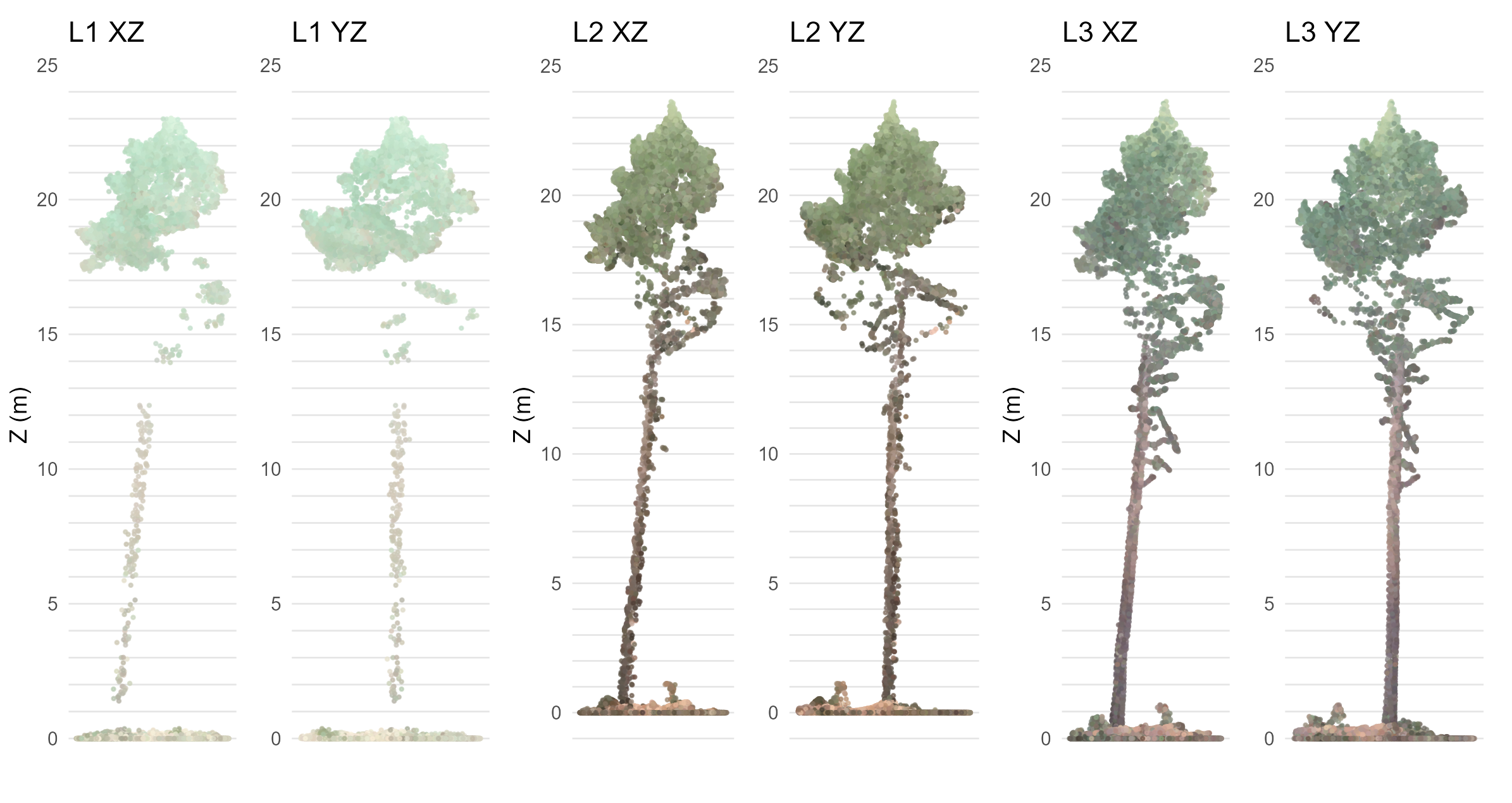
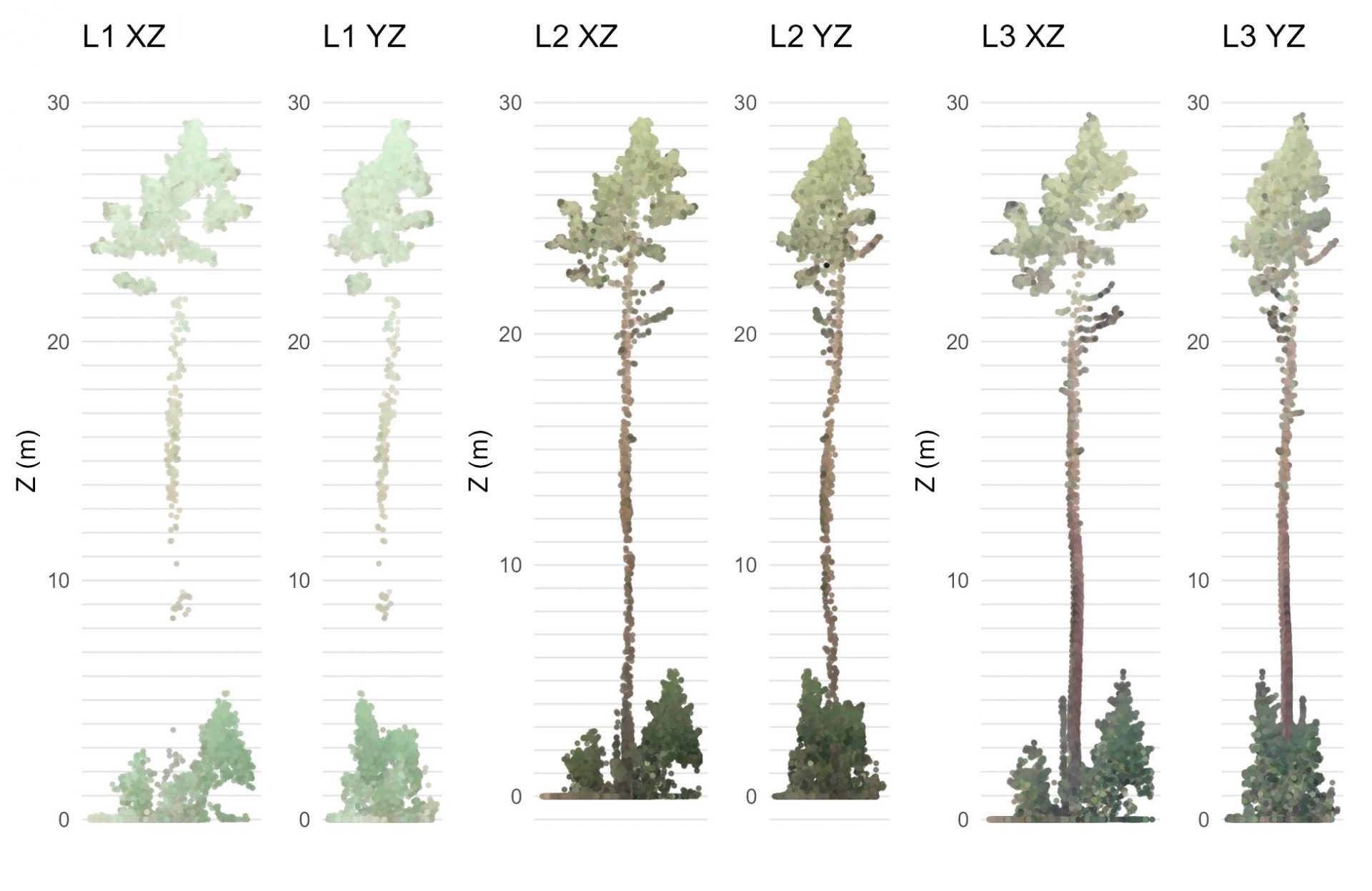
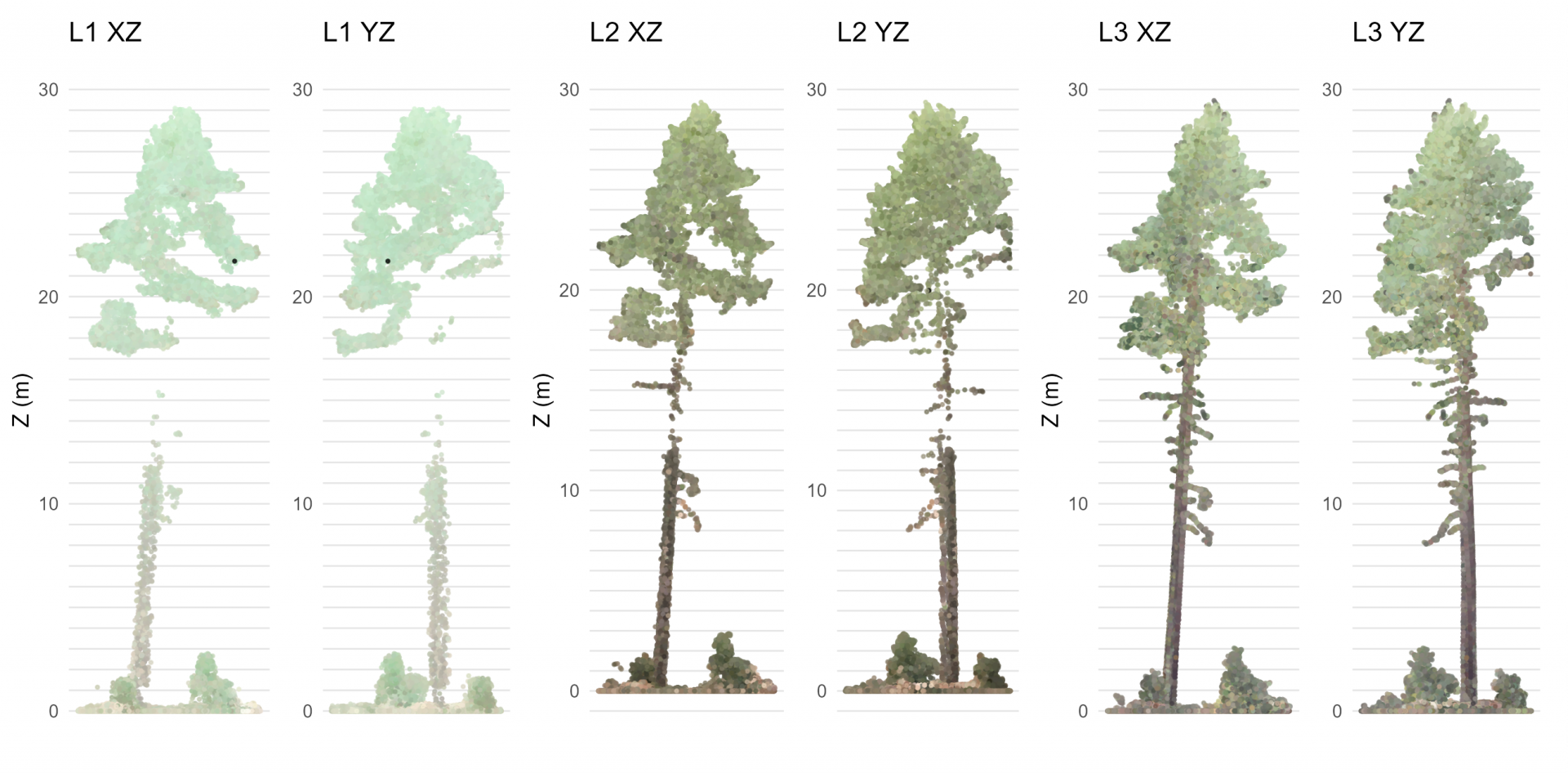
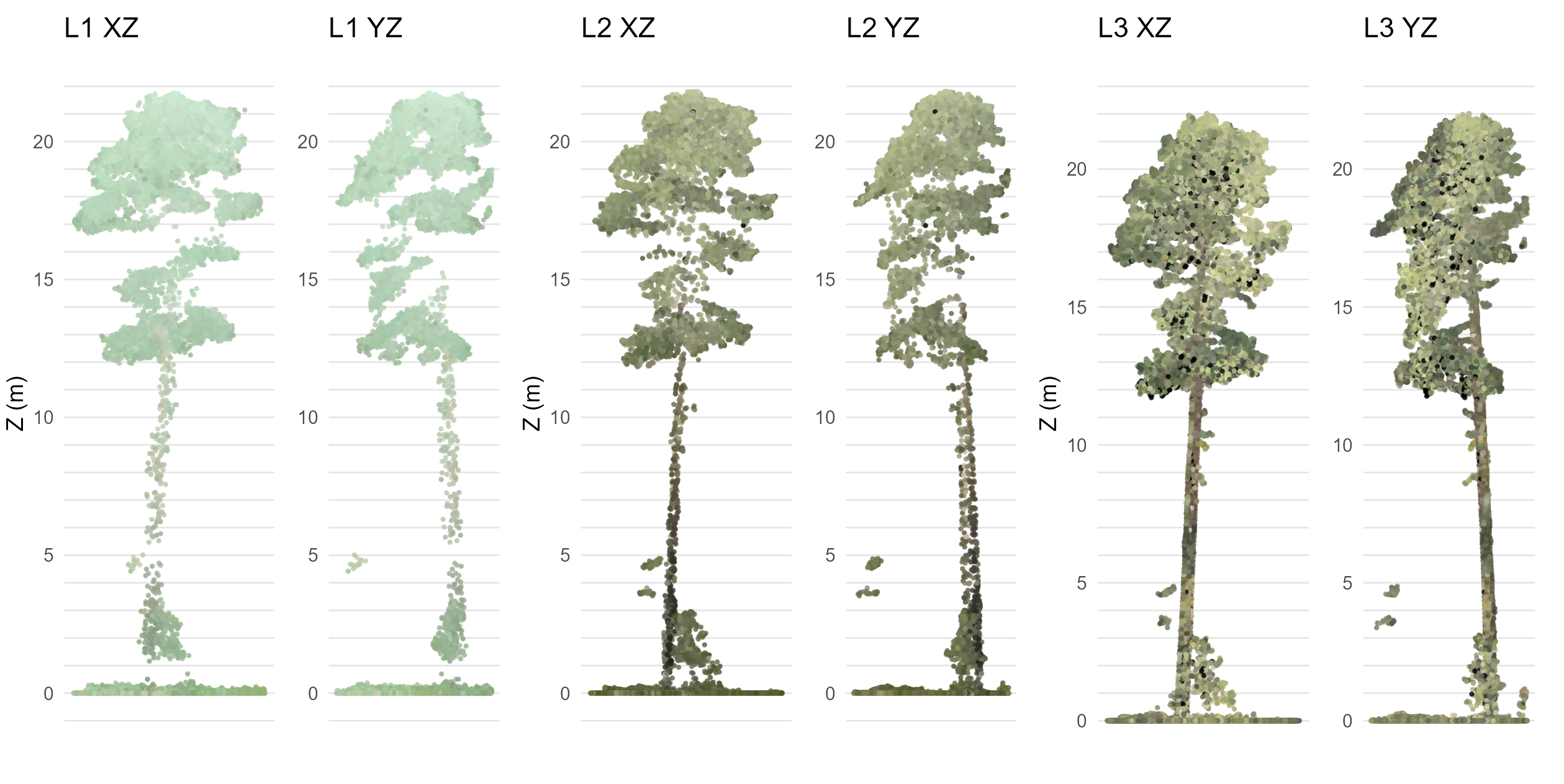
Um die Qualität der LiDAR-Punktwolken der drei Scanner objektiv beurteilen zu können, haben wir zunächst 105 Einzelbäume aus allen Datensätzen extrahiert und jeweils aus zwei Perspektiven visualisiert. Dieser Ansatz ermöglicht eine direkte Betrachtung der Punktdichte, der Detailtreue und insbesondere der Durchdringung tieferer Vegetationsschichten. Einige Bäume haben wir unten dargestellt. Wer sich selber ein Bild machen möchte, kann alle alle Einzelbaum-Vergleiche als pdf-Datei herunterladen.
Der Vergleich zeigt klar: Zwischen L2 und L3 bestehen spürbare Unterschiede – vor allem in den unteren Kronenbereichen und in der Stammabbildung. Während der L2 bereits eine solide Durchdringung liefert, erzeugt der L3 eine deutlich höhere Punktdichte und bildet feinere Strukturen wie untere Äste oder den Stammverlauf wesentlich vollständiger ab. Besonders auffällig ist die höhere Anzahl an Rückgaben im bodennahen Bereich, wodurch der L3 ein wesentlich konsistenteres 3D-Profil des gesamten Baumes erzeugt.
Allerdings zeigt sich auch: Die Überlegenheit des L3 ist nicht bei allen Einzelbäumen gleich stark ausgeprägt. Steht ein Baum genau zwischen zwei Fluglinien, nimmt die Abbildungsqualität sichtbar ab – ein rein geometrischer Effekt. Eine höhere LiDAR-Überlappung würde diese Schwäche ausgleichen, hätte jedoch längere Flugzeiten zur Folge. Die Option besteht also, muss aber projektabhängig abgewogen werden.
Der L1 bleibt in seiner Punktwolkenqualität erwartungsgemäß deutlich hinter L2 und L3 zurück. Sowohl die geringe Rückgabeanzahl als auch der größere Laser-Spot führen zu deutlich lückigeren Punktwolken, besonders im Stamm- und Unterkronenbereich.


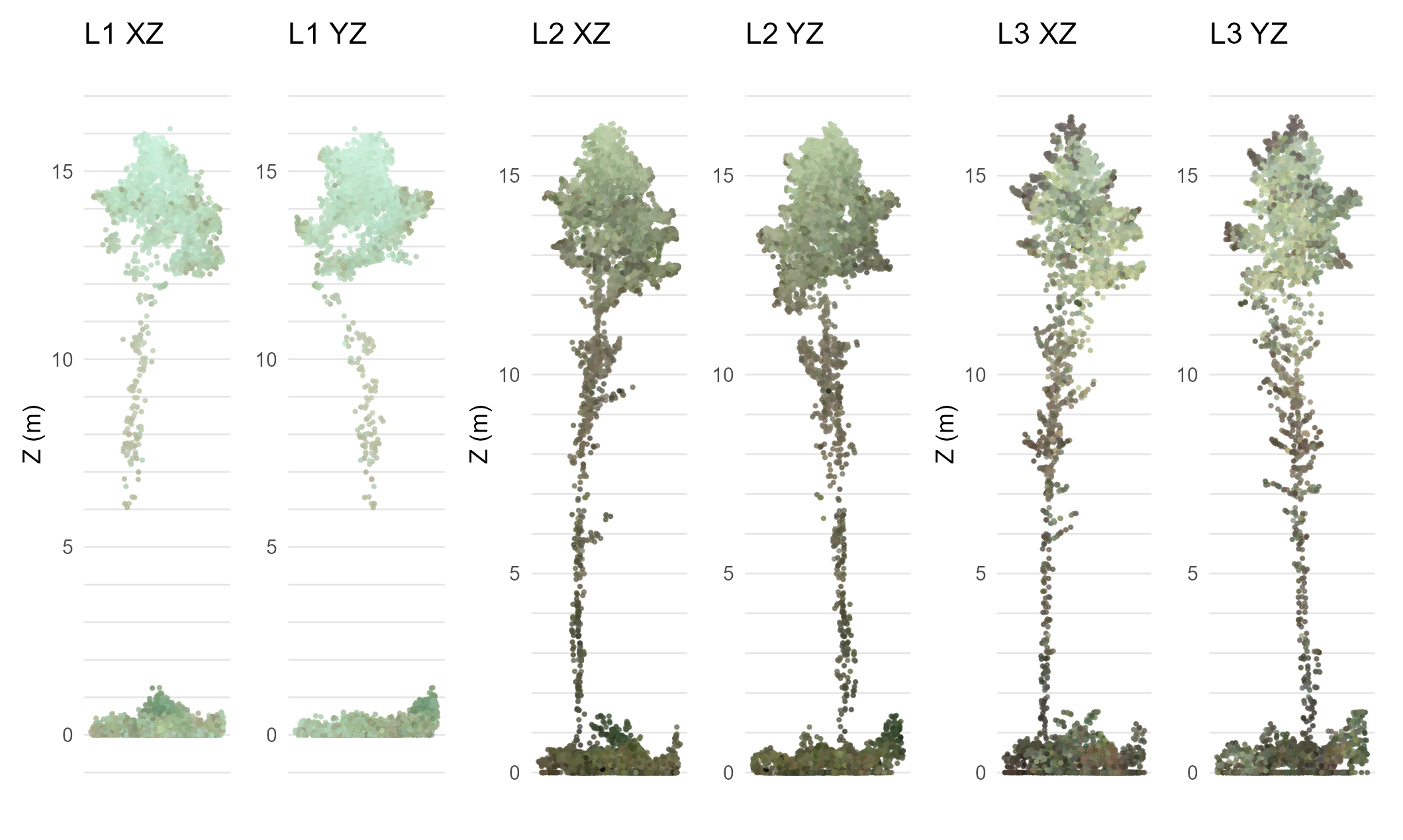

Durchdringungstiefe
Um die Durchdringungstiefe der LiDAR-Systeme zu bewerten, haben wir auf mehreren Transekten durch das Testgebiet vertikale Querschnitte aus den Punktwolken erzeugt. Diese Querschnitte zeigen besonders anschaulich, wie viele Messpunkte in unterschiedlichen Vegetationshöhen auftreten – vom Kronendach bis hinunter zum Waldboden.
Der Vergleich zwischen L1 und L2 macht sofort deutlich, wie groß der Technologiesprung zwischen den beiden Generationen ist: Während der L1 im Unterkronen- und Bodenbereich deutliche Lücken zeigt, erfasst der L2 hier durchgängig mehr Punkte und bildet sowohl die vertikale Struktur als auch die Geländemorphologie wesentlich vollständiger ab. Der Boden wird häufiger und homogener getroffen, und selbst innerhalb dichter Baumgruppen entstehen kaum noch “Schattenzonen”.
Der Sprung vom L2 zum L3 fällt weniger drastisch aus, ist aber klar erkennbar: Die Punktwolke des L3 wirkt in allen Schichten noch dichter, insbesondere im Bereich der Baumstämme und tiefen Vegetation. Hinzu kommt, dass der L3 durch seine höhere Leistungsreserve im Flug eine vergleichbare oder bessere Abbildungsqualität bei deutlich geringerer Flugzeit erzielt – ein entscheidender Faktor für große Reviere oder zeitkritische Einsätze.
Abgeleitete Produkte (vorläufige Ergebnisse)
Wir haben die Punktwolken aller drei Scanner durch unsere Standard-Auswertepipeline verarbeitet und jeweils ein Digitales Geländemodell (DTM) sowie ein Baumkronenhöhenmodell (CHM) erstellt. Dabei wurde schnell deutlich, dass für den L3 noch parameterseitige Anpassungen erforderlich sind, um das volle Potenzial auszuschöpfen. Die hier gezeigten Resultate sind daher als Zwischenergebnisse zu verstehen.
Bereits jetzt lässt sich jedoch festhalten: Für die reinen Standardprodukte wie DTM und CHM bringt der Umstieg auf den L3 qualitativ nur geringe Vorteile. Die Unterschiede zwischen L2 und L3 fallen bislang marginal aus. Im CHM des L3 haben wir bie den gewählten Flugeinstellungen sogar an einigen Stellen deutlich mehr Fehlstellen, die wir für diesen Versuch absichtlich nicht interpoliert haben.
Wir sind jedoch zuversichtlich, dass sich in weiterführenden Analysen – etwa bei der Einzelbaum-Segmentierung, der Baumartenklassifikation oder bei strukturellen Kennwerten – deutlichere Mehrwerte zeigen werden. Wir bleiben dran und schauen, was sich aus den Daten noch herausholen lässt.
Erste Einschätzung der Praxisrelevanz und Einschränkungen
Wir konnten den L3 nur einen einzigen Tag testen, weshalb abschließende Bewertungen derzeit noch schwierig sind. Besonders überzeugt haben uns jedoch die deutliche Zeitersparnis sowie die hervorragende Abbildungsqualität im Bereich der Baumstämme und der tieferen Bestandesschichten. Ein erster Blick auf die klassischen Standardprodukte – wie Digitales Geländemodell oder Kronenhöhenmodell – zeigt hingegen nur geringe Unterschiede zwischen L2 und L3.
Noch ausstehend sind detaillierte Tests zur Segmentierung einzelner Bäume. Hier erwarten wir aufgrund der präziseren Stammabbildung des L3 spürbare Vorteile. Da die Segmentierungsqualität wiederum maßgeblich die Genauigkeit der KI-gestützten Baumartenerkennung beeinflusst, könnte dies ein deutliches Plus im praktischen Einsatz bedeuten. Für eine belastbare Aussage benötigen wir jedoch noch weitere Auswertungen.
Was wir bisher bewusst ausgespart haben: die RGB-Daten. Tatsächlich hatten wir erhebliche Schwierigkeiten, aus den L3-Daten ein qualitativ brauchbares Orthofoto zu erzeugen. Wir stehen dazu bereits im engen Austausch mit DJI und gehen davon aus, bald weitere Erkenntnisse präsentieren zu können – in Teil 2 unseres Vergleichs der LiDAR-Scanner für die Forstwirtschaft.
Zwischenfazit und Ausblick
Unsere Tests zeigen deutlich: Der technische Fortschritt bei den DJI-LiDAR-Scannern ist real und mit jeder Generation spürbar – auch beim Sprung vom L2 zum L3. Der L3 erzeugt eine erheblich dichtere Punktwolke, bildet Baumstämme und Unterkronenbereiche detaillierter ab und überzeugt mit einer beeindruckenden Vegetationsdurchdringung – selbst bei breiteren Flugstreifen. In vielen Bereichen – Rücksignalanzahl, Detailtiefe, Sensorauslastung – setzt er damit neue Maßstäbe für forstliche Drohnenbefliegungen.
Gleichzeitig relativieren die bisherigen Ergebnisse auch einige Erwartungen: Bei Standardprodukten wie Digitalem Geländemodell (DTM) oder Baumkronenhöhenmodell (CHM) fallen die Qualitätsunterschiede zwischen L2 und L3 bislang nur gering aus. Für viele Routineanwendungen ist der L2 daher vollkommen ausreichend. Zudem hängt der tatsächliche Mehrwert stark von äußeren Faktoren ab – etwa der Struktur des Bestandes, der Flugplanung oder den verwendeten Auswerteparametern.
Unterm Strich lässt sich festhalten: Der L3 ist keine Revolution im klassischen Sinne, aber ein klarer technologischer Fortschritt mit großem Potenzial – vor allem dann, wenn höchste Detailtiefe, anspruchsvolle Analysen oder sehr große Flächen im Mittelpunkt stehen.
Wir werden die Daten weiter auswerten und zusätzliche Erfahrungen sammeln. Die Praxis zeigt: Erst viele Befliegungen unter unterschiedlichen Bedingungen offenbaren wirklich alle Stärken und Schwächen eines Systems.
Wenn auch Sie Interesse an einer LiDAR-Befliegung (mit dem DJI Zenmuse L3) haben, sprechen Sie uns gerne an.